
WiFree-Copter
Quadrocopter mit Pi Zero zum Selberdrucken
Kameradrohnen bringen die Perspektive eines Vogels live aufs Smartphone. Der Technik gewordene Menschheitstraum kostet fertig viel Geld, das der erste Crash wieder vernichtet. Mit Teilen aus dem heimischen 3D-Drucker und einem Raspberry Pi Zero samt Kamera gelingt der Einstieg unter 200 Euro – eigene Ersatzteilproduktion inklusive.
Um den Selbstbau von Quadrocoptern entwickelte sich in den letzten Jahren ein Ökosystem an Zulieferern. Wer in das Hobby einsteigt, bekommt günstige Flightcontroller und Motortreiber aus China, dazu kostenlose Firmwares und viele Standardbauteile wie Brushless-Motoren, Rotoren und Lithium-Polymer-Akkus zu moderaten Preisen. Zusammen mit einem Raspberry Pi Zero mit passender Kamera lässt sich damit ein Quadrocopter für weniger als 200 Euro konstruieren. Leider hebt die üblicherweise eingesetzte RC-Fernsteuerung die Gesamtkosten schnell wieder über die Schmerzgrenze. Der WiFree-Copter von open-diy-projects.com erspart die Funkfernbedienung, indem er die Steuerbefehle der dazugehörigen Android-App einfach per WLAN empfängt und vom Raspi an den Flightcontroller weiterleitet. Über WLAN gelangt auch ein Livebild der Kamera in die App, die parallel Aufnahmen zulässt.
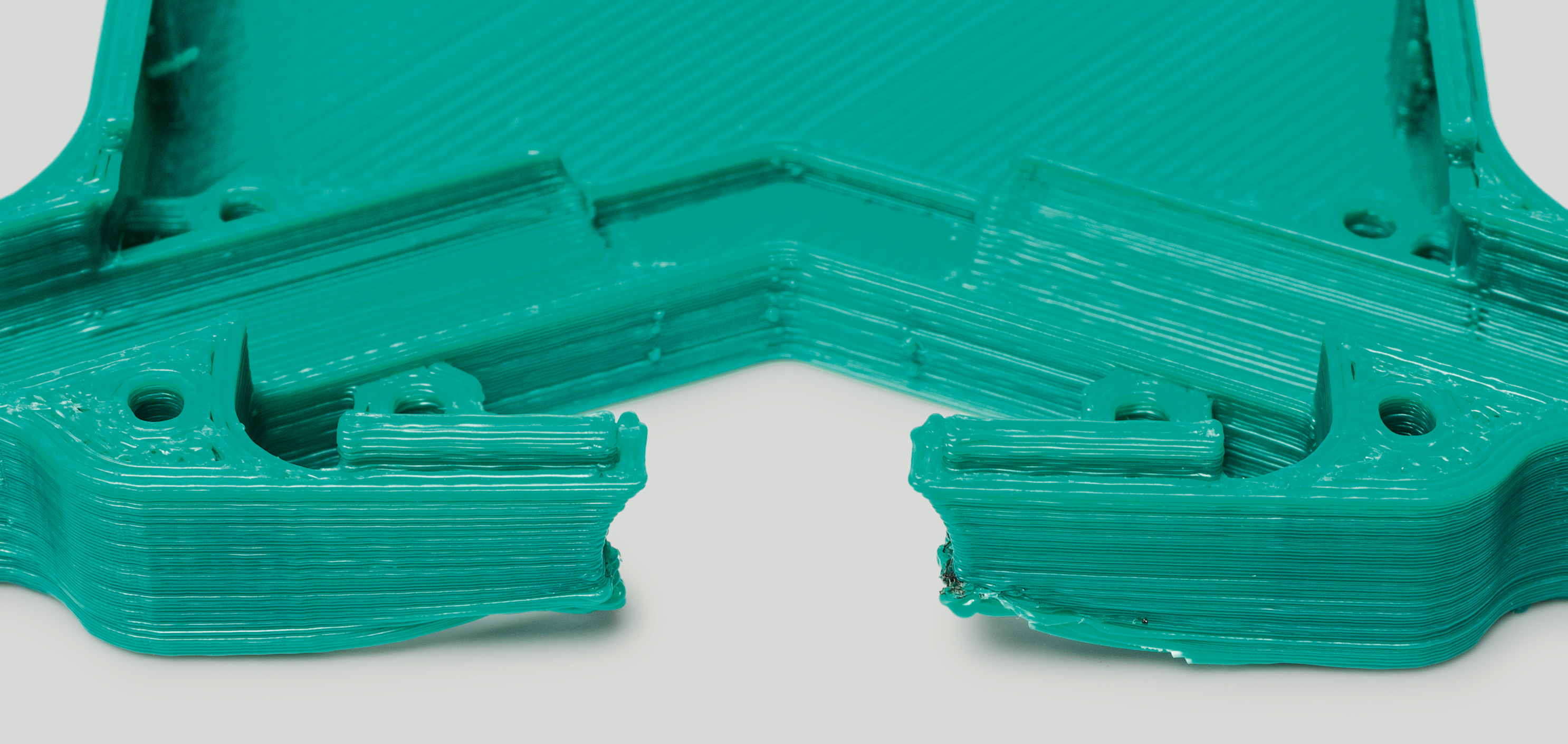
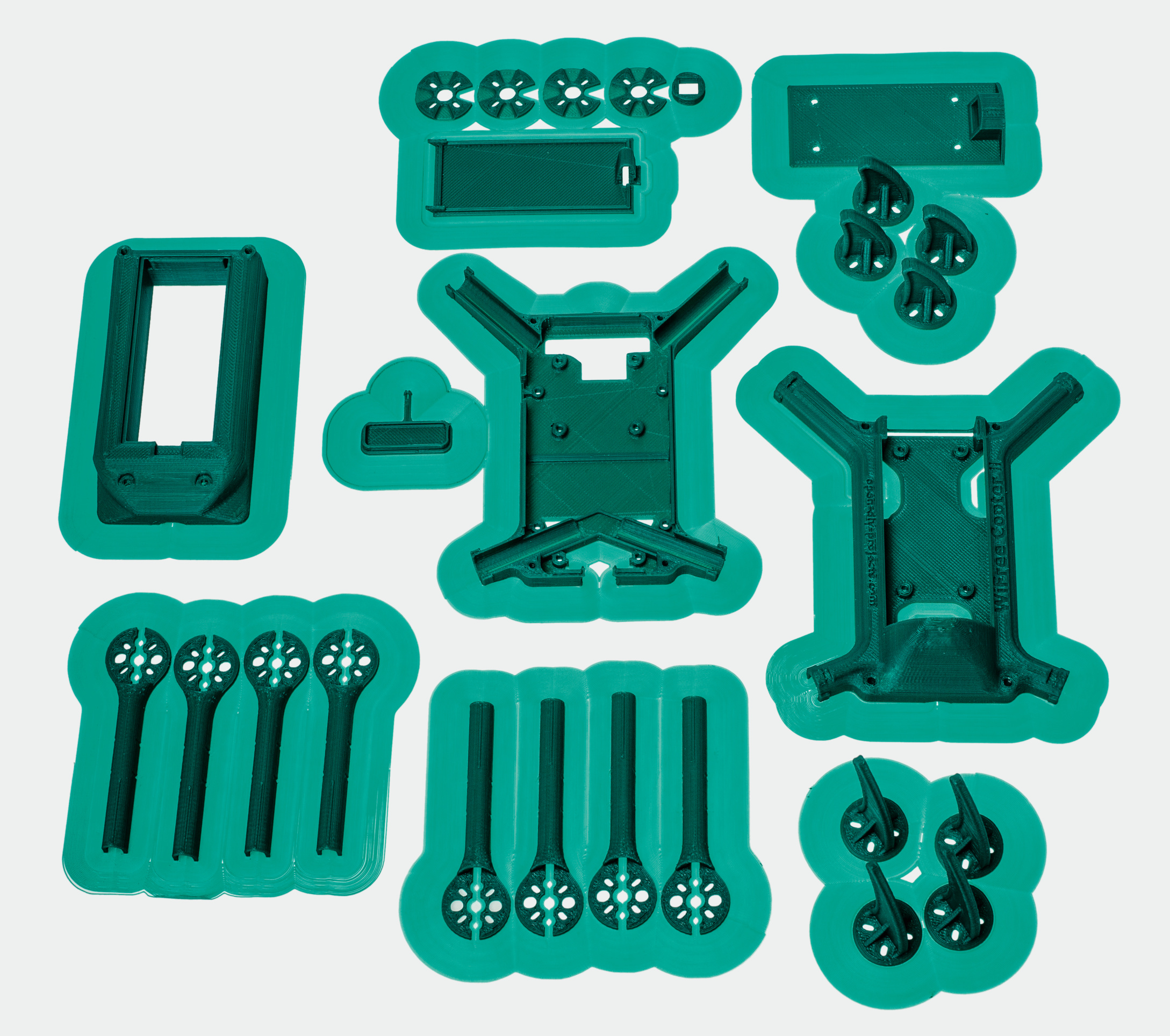
Rahmen und Anbauteile des WiFree-Copter drucken sich Besitzer eines 3D-Druckers selbst. Sollte beim Jungfernflug etwas zu Bruch gehen, produziert der eigene Drucker die Ersatzteile. Beim Zusammenbau muss man außerdem löten und schrauben, was mindestens eine Woche dauert. Wer noch keine Erfahrung mit dem Bau von Quadrocoptern hat, sollte sich zusätzlich die Zeit nehmen, neben der Webseite des Projekts auch das Forum zu studieren (siehe c’t-Link).
Drucktipps
Im Projektforum stehen zwei Versionen der Druckvorlagen zum Download, die sich ohne Stützmaterial auf Druckern ausdrucken lassen, die nach dem FDM-Prinzip (Fused Deposition Modelling) arbeiten. Neben der Originalversion gibt es inzwischen eine überarbeitete Variante der Rahmenteile, die ein Akkufach mit Klappe vorsieht und weniger überhängende Strukturen enthält. Da normaler PLA-Kunststoff sich schon bei hohen Temperaturen im Auto verformen kann, empfiehlt [1] hochtemperaturbeständiges PLA H-T. Verfügt der Drucker über ein beheiztes Bett, druckt er die Teile mit einer großzügigen Umrandung (Brim) von mindestens 1,5 cm auch aus ABS-Polymer. Ohne Umrandung heben sich die Ränder der größeren Druckobjekte leicht vom Drucktisch (Warping). ABS wird bei mehr als 200 °C verarbeitet, sodass der Copter auch im prallen Sonnenschein nicht den Ikarus macht.
Wer Zugriff auf einen 3D-Drucker hat, der nach dem Lasersinter-Verfahren arbeitet, kann die Kunststoffteile auch damit drucken. Ein Auftrag bei einschlägigen Dienstleistern kostet aber mehr als eine fertige Drohne aus China. Drucker, die mit Licht flüssiges Harz verfestigen, eignen sich für die Copter-Teile normalerweise nicht, da sie mit den üblichen Harzen zu spröde Objekte drucken.
Flightcontroller
Die Konstrukteure des WiFree-Copter empfehlen den CC3D oder optional einen Naze32 als Flightcontroller. Ausreichend getestet haben sie aber nur den CC3D. Um ihn zu programmieren, braucht man zusätzlich einen externen USB-UART-Konverter. Die integrierte USB-Buchse dient während des Flashens nur zur Spannungsversorgung. Der USB-Port des gleich großen Naze32 erlaubt die Programmierung ohne externen Adapter. Die Micro-USB-Buchse liegt aber so, dass man vom Gehäuse ein Stück wegschnitzen muss, um im eingebauten Zustand ein Kabel anschließen zu können.
Zum Programmieren der Firmware steht eine Chrome-Erweiterung namens INAV bereit, die sich wie ein vollwertiges Programm bedienen lässt. Sie steht für alle Desktop-Betriebssysteme im Chrome-Webstore bereit. Da das Programm Open Source ist, kann man auch die Quellen von GitHub herunterladen und lokal installieren. INAV ist ein Fork von CleanFlight, sodass viele Tipps und Anleitungen für beide Varianten funktionieren. Das Programm flasht und konfiguriert die gleichnamige Firmware, die auf beiden Flightcontrollern läuft.
Nach dem Einspielen der richtigen Firmware baut ein Klick auf den Connect-Button oben rechts eine Verbindung zum Flightcontroller auf. Wenn das klappt, zeigt der „Setup“-Tab eine 3D-Vorschau eines Quadrocopters, die allen Bewegungen der echten Platine genau folgt. Im Forumsbeitrag zum Flightcontroller stehen die nötigen Einstellungen für den CC3D, für den Naze32 haben einige Benutzer Hinweise in den Kommentaren hinterlassen.
Das Gehäuse lässt eine Öffnung, damit man auch beim komplett zusammengebauten Copter an den Flightcontroller herankommt. Damit die fertige Drohne ruhig in der Luft steht, ohne abzudriften, müssen einige Einstellungen am Ende mit INAV nachjustiert werden.
Pi Zero
Für den Raspi bieten die WiFree-Maker ein fertiges Image für die SD-Karte an. Das System basiert auf Raspbian Jessie Light, bindet aber nur eine Datenpartition mit Schreibzugriff ein, sodass das System keinen Schaden nimmt, wenn der Raspi ohne Vorwarnung vom Strom getrennt wird. Der Raspi schreibt die Videos auf die Datenpartition (720p H.264), falls man in der App eine Aufzeichnung aktiviert.
Für die WLAN-Verbindung spannt der Raspi ein eigenes WLAN auf. Im bereitgestellten Image fehlen jedoch viele Treiber für den WLAN-Access-Point-Daemon hostapd, sodass einige WLAN-Adapter, die üblicherweise mit dem Raspi funktionieren, in diesem System nicht arbeiten. Problemlos funktionieren nur zwei Modelle: der LogiLink WL0084B und der LogiLink WL-0151. Es gibt jeweils neuere Varianten mit anderen Chips, die sich nur im Buchstaben am Ende der Modellbezeichnung unterscheiden. Diese funktionieren nicht. Im Forum haben einige Bastler mit anderen WLAN-Adaptern und zusätzlichen Treibern experimentiert, um die WLAN-Reichweite zu erhöhen. Leider konnte die App bei diesen Adaptern die Verbindungsqualität nicht anzeigen, sodass sie permanent vor einem Verbindungsabbruch warnt.
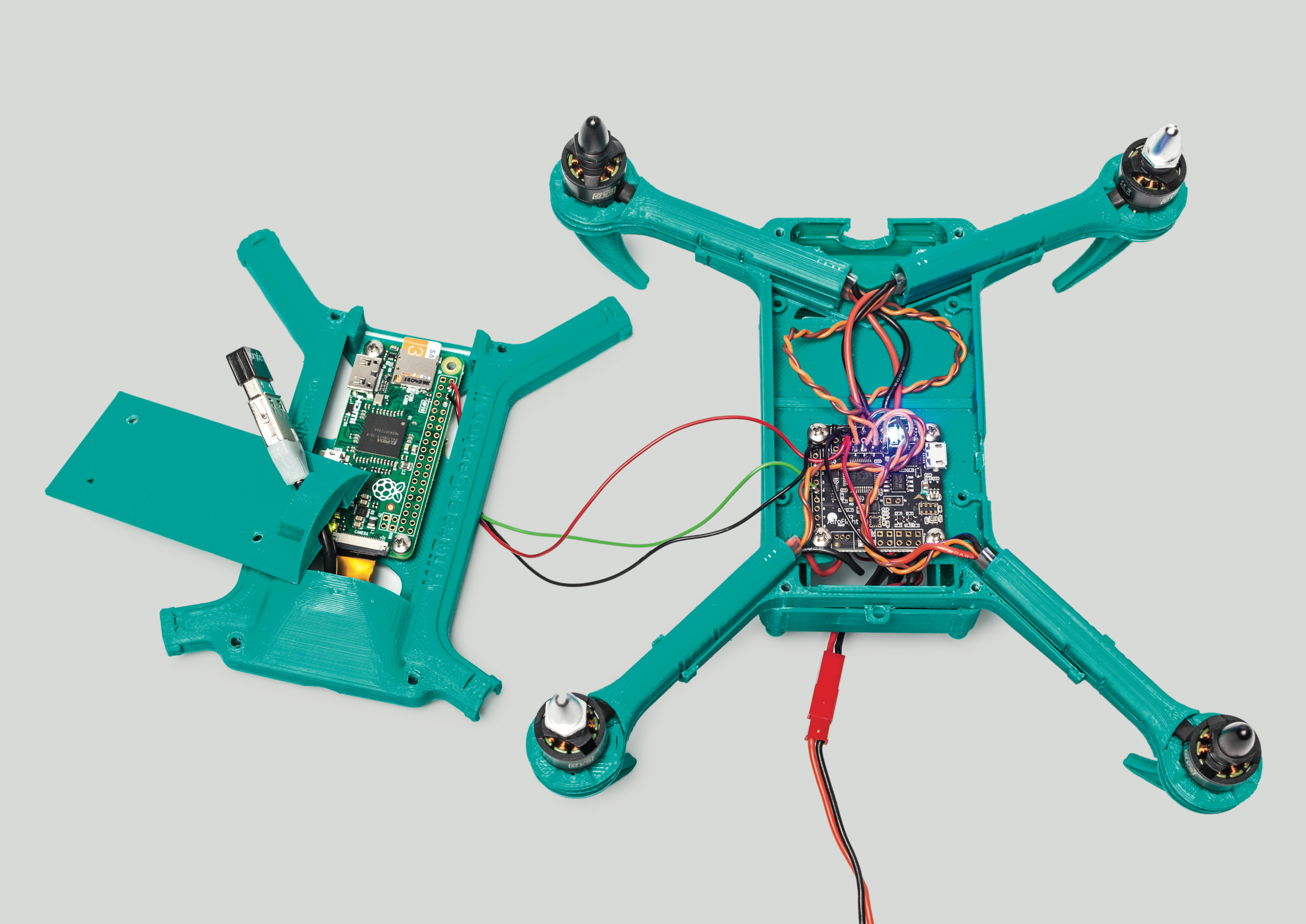
Zusammenbau
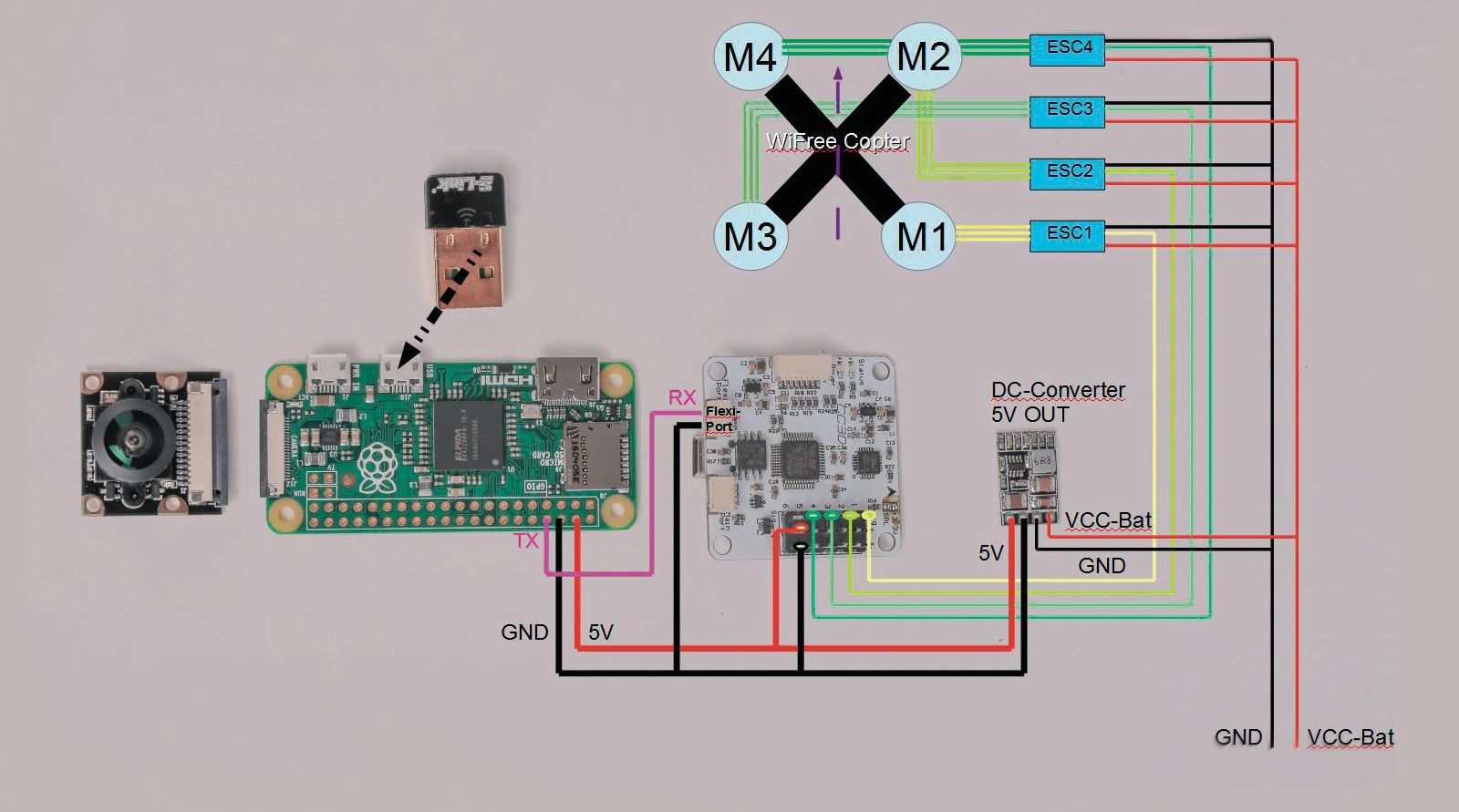
Der elektrische Zusammenbau gestaltet sich glücklicherweise sehr einfach: Vom 5-Volt-Step-Down-Wandler gehen eine Masseverbindung und ein 5-Volt-Kabel zu den Pinleisten von Flightcontroller und Raspi. Für die serielle Verbindung kommt noch ein Kabel von einem Tx-Pin des Raspi zum Rx-Pin am Flightcontroller hinzu. Das Signal der vier Motortreiber greift man an den mit 1 bis 4 beschrifteten inneren Pins der 3×6-Leiste am Flightcontroller ab. Masse und Spannungsversorgung der Motortreiber kommen direkt vom Akku. Um Kurzschlüsse beim Spannungswandler zu vermeiden, sollte er in ein Stück Schrumpfschlauch gehüllt oder mit Klebeband isoliert werden.
Wer die erste Version der Druckteile verwendet, kann zuerst die Elektronik zusammenlöten und zuletzt erst die Platinen an den Rahmen schrauben. Bei den überarbeiteten Teilen ist es sinnvoll, die Kabel schon während des Lötens durch die passenden Öffnungen im Rahmen zu ziehen. Die zwei Hälften der Arme plus Standfüße und Distanzplättchen werden durch die vier Schrauben der Motoren zusammengehalten. Statt der Distanzplättchen kann man auch Schutzkörbe einbauen. Wenn man die Kabel zu den Motortreibern ausreichend lang lässt, kann man die Motortreiber einfach in die ovale Höhlung der Arme hineinschieben.
Von dem schmaleren Flachkabel zur Kamera am Pi Zero gibt es mehrere Varianten. Alle sind wesentlich länger als die kurze Distanz zur Kameraöffnung, sodass das Kabel im Gehäuse etwas mäandern muss. Dabei kann es in Verbindung mit dem USB-OTG-Kabel zum WLAN-Adapter eng zugehen. Bei der zweiten Version der Druckteile muss das USB-Kabel durch die Öffnung in der flachen Abdeckung der Oberseite geführt werden. Viele OTG-Kabel haben dafür zu dicke Stecker. Mit einem Cutter lässt sich die Kunststoffummantelung der Stecker aber auftrennen und entfernen, sodass das Kabel leichter hineinpasst. Wer das Kabel lieber aus einem Stecker und einer Buchse selbst lötet, sollte die Adern verdrillen, um den WLAN-Empfang möglichst wenig zu stören.
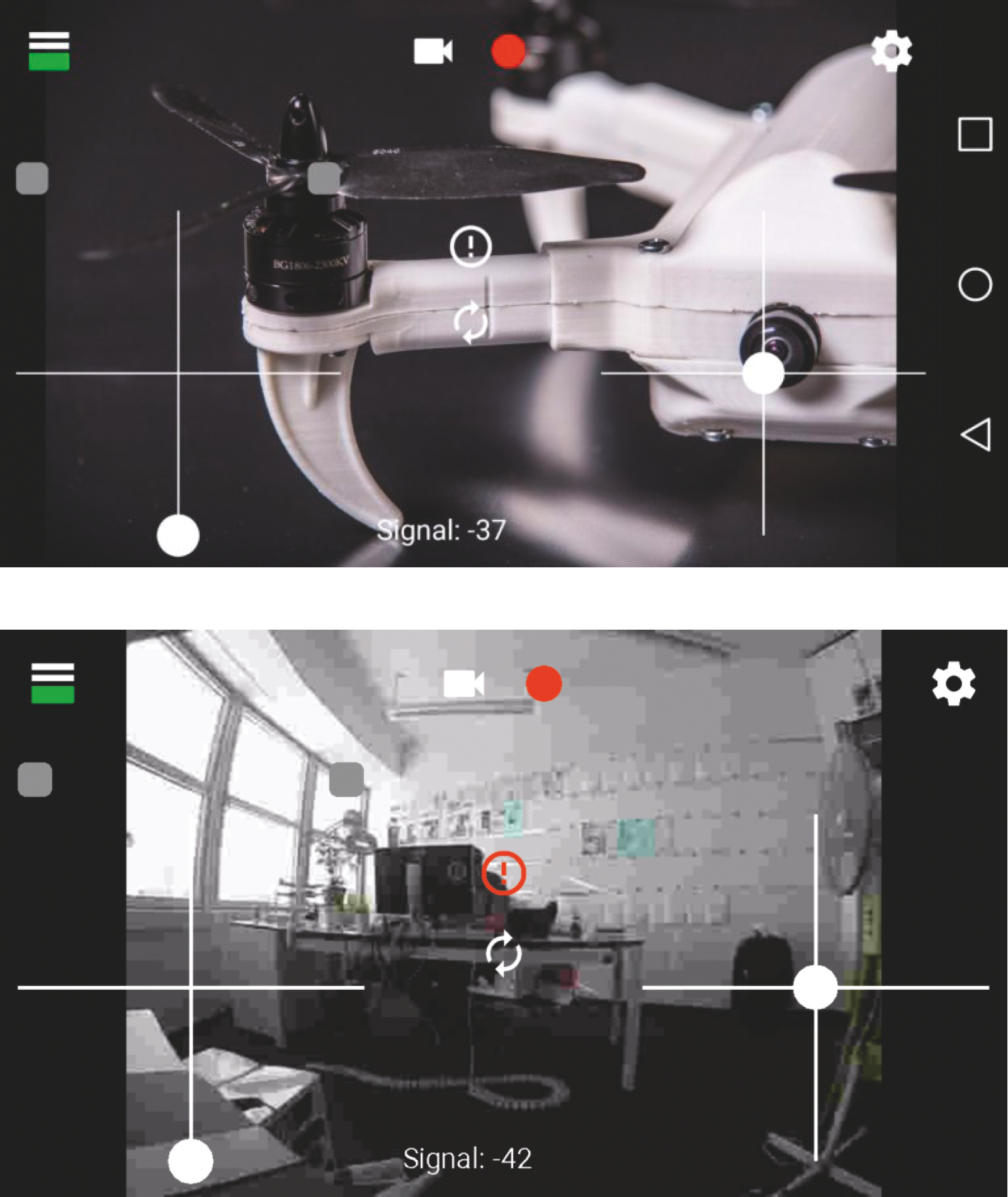
WiFree-App
Die WiFree-App nimmt die Steuerbefehle des Piloten entgegen und leitet sie an den Raspi weiter, der sie an den Flightcontroller durchreicht. Damit spart sie die RC-Fernsteuerung ein und arbeitet wie bei Videodrohnen üblich auch als Anzeige für ein Livebild der Kamera auf dem Smartphone. Ein Nachteil der WLAN-Verbindung zum Quadrocopter ist die geringere Funkreichweite. Die App zeigt die Verbindungsqualität permanent am unteren Rand des Displays an und lässt das Handy vibrieren, wenn die Verbindung abzubrechen droht.
Im Projektforum steht die App als kostenloses APK zum Download bereit. Um sie zu installieren, muss man auf dem Smartphone dafür „Apps aus unbekannten Quellen“ in den Sicherheitseinstellungen aktivieren. An der App wird weiterhin gearbeitet, sodass es sich lohnt, im Forum nach der aktuellsten Version Ausschau zu halten. Der Entwickler scheint für Hilfe offen zu sein, hat den Quelltext aber leider nicht veröffentlicht.

Das Bedienkonzept ahmt trotz Touchscreen eine RC-Fernsteuerung nach: Die vier Achsen der zwei Regler steuern Gas, Rollen, Nicken und Scheren. Welche Achse wo liegt, lässt sich über vier Modi in den Einstellungen konfigurieren. Der Gasregler bleibt auf seiner Einstellung stehen, während die anderen Achsen jeweils in die Mittelstellung zurückkehren, wenn man den Finger vom Steuerkreuz nimmt.
Sowohl der Bau als auch der Flug eines Quadrocopters sind eine anspruchsvolle Aufgabe. Wer sich noch nicht auskennt, muss einiges lernen und auch Rückschläge einrechnen. Der WiFree-Copter begrenzt das finanzielle Risiko im Schadensfall. Außerdem ist bei Kollisionen nicht alles verloren: Denn wer ihn aufgebaut hat, kann ihn auch reparieren. (jme@ct.de)
Projektwebseite, Projektforum und Downloads für Druckvorlagen, Raspi-Image und Android-App:ct.de/ygst